99
МОДЕЛИРОВАНИЕ НА ЭВМ
ПРИНЯТИЯ РЕШЕНИЯ ПРИ СЛУХОВОМ ОБНАРУЖЕНИИ
Ю. А. ИНДЛИН
Теория принятия решения [7], так же как и известная теория обнаружения сигнала (ТОС), предложенная американскими психофизиками [1], [2], [9], [10], разрабатывалась в предположении неограниченности сенсорного пространства. Показано [8], что такое предположение допустимо при обнаружении на фоне прерывистого шума; если же шум предъявляется непрерывно, то сенсорное пространство обнаружения оказывается ограниченым (низким) сенсорным порогом. Расширение правила принятия решения для случая ограниченного сенсорного пространства не представляет в рамках нашей теории каких-либо принципиальных трудностей, однако предсказание усредненных результатов работы испытуемого (для последующего сравнения с результатами психоакустических экспериментов) вырастает в проблему, наиболее простой и эффективный путь решения которой — моделирование с помощью ЭВМ процесса принятия решения при слуховом обнаружении.
Принятие решения обычно исследуется с помощью метода
«да — нет», при котором испытуемый должен ответить, был ли стимул,
предъявленный ему в интервале наблюдения, сигналом на фоне шума (s) или только одним шумом (n). Ответ S — «да,
сигнал предъявлялся» — может быть дан на предъявление как s, так и n в первом случае ответ S/s называют
правильным обнаружением, во втором случае ответ S/n называют ложной тревогой. Числа ответов S/s и S/n, отнесенные к общему числу испытаний, т. е. пропорции
ответов P(S/s) и P(S/n),
существенно изменяются под влиянием инструкции, в частности в тех случаях,
когда испытуемому сообщают об изменении априорной вероятности p(s) появления сигнала (пропорции
сигнальных проб) в экспериментальной серии. Зависимость P((S/s)) от P(S/n), проявляющаяся при изменении инструкции, носит название
рабочей характеристики приемника (РХП). Основная проверка теории принятия
решения заключается в сравнении РХП, получаемых в психоакустических
экспериментах и предсказываемых теорией.
1. ТЕОРИЯ ПРИНЯТИЯ РЕШЕНИЯ
В силу случайной природы шума сенсорные события, вызываемые многократным предъявлением стимула (s или n), в общем случае отличаются. Предполагается, что это отличие проявляется лишь в величине сенсорного эффекта; поэтому каждое сенсорное событие можно представить точкой на некоторой оси х сенсорных эффектов, а вероятность появления сенсорного эффекта на предъявление в интервале наблюдения s или n можно описать (рис. 1) функциями распределения f(x/s) и f(x/n).
Эти функции пересекаются, и, следовательно, по величине сенсорного эффекта в интервале наблюдения невозможно безошибочно установить, какое физическое событие (s или n) вызвало данный сенсорный эффект х. Предполагается, что испытуемый выбирает некоторую величину К на оси х (критерий принятия решения) и руководствуется правилом: если сенсорный эффект х в данном интервале наблюдения превзошел критерий К, то дается ответ S, если х≤К, то ответ N. Суть теории принятия решения — в указании на то, каким образом испытуемый выбирает критерий К.
Согласно нашей теории, в основу которой положен принцип саморегулирования, испытуемый тем или иным способом получает количественное представление о результатах своей будущей деятельности в виде p(S) — ожидаемой пропорции ответов S. В процессе эксперимента у испытуемого формируется представление о реальных результатах его
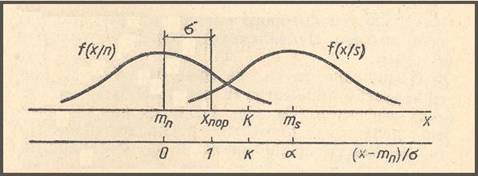
Рис. 1. Распределение f(x/n) и f(x/s) сенсорных
эффектов, вызванных предъявлением шума и сигнала в смеси с шумом;
mn, ms и σ — среднее и стандартное отклонение распределений; xпор = mn +
σ — сенсорный порог; К — критерий принятия
решения; нижняя ось — нормированные по σ
сенсорные расстояния от mn.
100
деятельности в виде Pi(S)—текущей пропорции уже данных им ответов S. После каждого i-го ответа испытуемый производит сравнение ожидаемой и реальной пропорций ответов, в результате которого происходит скачок критерия ΔK согласно выражению
(1) ΔKi,=c[Pi(S)-p(S)],
где с — коэффициент связи.
Новая величина критерия определяется рекуррентным соотношением
(2) Ki+1 = Ki + ΔKi.
Если испытуемому сообщается априорная вероятность появления сигнала p(s), то ожидаемая пропорция ответов p(S) отождествляется испытуемым с априорной вероятностью появления сигнала, что формализуется как p(S)=p(s) [7]. В этом случае из (1) и (2) следует, что критерий К должен совершать колебания вокруг оптимального значения Копт, при котором p(S/s, n)—вероятность ответа S на предьявление стимула (s или n) — в точности совпадает с априорной вероятностью появления сигнала, т. е. p(S/s, n) =p(s), где

p(n)=1—p(s).
Если отклонения критерия К от оптимального значения Копт не слишком велики, то P(S/s, n) — пропорция ответов S в экспериментальной серии будет близка к p(S/s, n) — вероятности ответа S при Копт, поэтому можно ожидать выполнения соотношений
(3) P(S/s, n)=p(S/s,n)=p(s).
Как показано в [4], из (3) следует, что
![]()
Последнее соотношение является уравнением прямой, проведенной (рис. 2) через точку с координатами (0,1) под углом γ, определяемым выражением
(4) tgγ=—p(n)/p(s).
Это предоставляет возможность удобной графической проверки теории: если экспериментальная точка при данном p(s) лежит на луче, наклон которого определяет (4), то теория хорошо соответствует экспериментальным данным.
Положение точки на луче при К = Копт определяется параметрами распределений сенсорных эффектов (см. рис. 1). Если, как это обычно делается, положить распределения нормальными со средними ms и mn и с равными стандартными отклонениями σ, то положение точки доопределится пересечением луча с дугой РХП (см. рис. 2), расположение которой однозначно определено нормированным по σ расстоянием d между средними: ms и mn:d = (ms— mn)/σ.
Вместе с тем показано [8], что обнаружение сигнала на
фоне непрерывного шума требует более сложного описания сенсорных событий.
Оказалось, что сенсорные эффекты слабее некоторого xпор не могут разделяться
испытуемым по величине, что равносильно ограничению сенсорных величин снизу
сенсорным порогом xпор. При х<xпор
испытуемый не обнаруживает сигнала, однако было бы неправильно считать, что в
этих случаях он всегда дает ответ N.В
согласии с нашей теорией, предполагается, что в отсутствие сенсорной информации
(при х< xпор)
испытуемый руководствуется правилом, которое способствует выполнению (3), а
именно
если pi(S)—p(s)<0, то ответ S,
(5)
если Pi(S)—p(s)≥0,
то ответ N;
другими словами, если в отсутствие сенсорной информации текущая пропорция ответов меньше ожидаемой, то она корректируется ответом S, если больше ожидаемой — то ответом N.
В тех случаях, когда х>хпор, правило принятия решения остается прежним:
если хi>Кi, то ответ S;
если хi≤Кi, то ответ N.
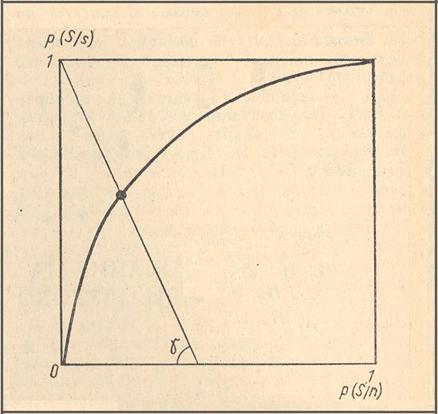
Рис. 2. Иллюстрация к предсказанному
теорией расположению экспериментальной точки на пересечении РХП с лучом,
проходящим через точку (0,1) под углом γ = arctg [—p(n)/p(s)]
Расположение точки на луче, проведенном под углом γ (см рис. 2), продолжает оставаться необходимым условием соответствия теории и практики, однако РХП, пересечение которой с указанным лучом дает положение экспериментальной точки, уже не определяется достаточно просто аналитически. Для построения РХП требуются вычислительные методы, в частности метод Монте-Карло.
Этот метод исключительно удобен также при значительных отклонениях критерия К1от оптимальной величины. Прежде всего это возможно в переходном режиме, который возникает при изменении p(s), требующем смещения прежнего критерия к оптимальному значению, определяемому новыми условиями. Кроме того, это может быть вызвано большой величиной коэффициента связи с, который определяется тренированностью испытуемого. Конструкция
101
текущей пропорции ответов, учитывающая
свойства памяти испытуемого, также может влиять на характер колебаний критерия
около Копт.1
2. ИССЛЕДОВАНИЕ ОБНАРУЖЕНИЯ НА ФОНЕ ПРЕРЫВИСТОГО ШУМА (БЕСПОРОГОВАЯ МОДЕЛЬ СЕНСОРНОГО ПРОСТРАНСТВА)
Суть используемого вычислительного метода в том, что с помощью имеющегося в ЭВМ датчика случайных чисел имитируются случайные события, имеющие место при обнаружении сигнала на фоне шума.
Случайный характер появления сигнала имитировался тем, что датчик случайных чисел в некотором i-м испытании генерировал число Аi представляющее собой реализацию случайной величины, равномерно распределенной на интервале [0—1] (т. е. 0≤ Аi ≤ 1). Если Аi < р (здесь и ниже для упрощения записи вместо p(s) будет использоваться р), то это обозначалось как событие Wi = 1 (сигнал + шум), если Аi > р, то Wi=0 (шум).
Случайный характер величины сенсорного эффекта имитировался с помощью того же датчика путем генерации нового случайного числа
0≤ Аi ≤ 1
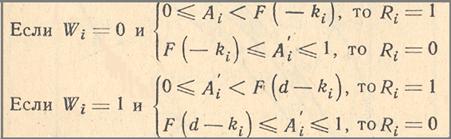
При Wi = 0 вероятность того, что xi >Кi, равна F(— ki)=F[(mn—Ki)/σ] (см. рис.1), где F означает интеграл Лапласа, изменяющийся в пределах от 0 до 1. Следовательно, если Аi < F ( — ki), то это означает, что сенсорный эффект в данном испытании превзошел критерий и ЭВМ сообщает о наличии сигнала (Ri = 1). Если Аi,≥F(— ki), то ответ Ri = 0.
Аналогично при Wi = 1, с той лишь разницей, что сравнение случайного числа Аi производится с величиной F(d — ki) (см. дополнительную ось на рис. 1).
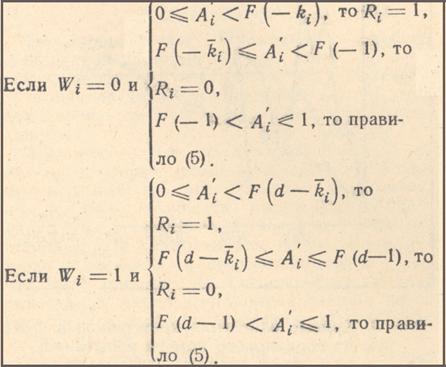
Итак, решение Ri принимается согласно следующему правилу:
Здесь, аналогично (1) и (2), ki=ki-1 + Δki-1, Δki-1=c[Pi-1— p] (для упрощения записи вместо Pi(S) будет писаться Pi), а начальное положение критерия выбирается симметричным, т. е. ko — d/2.
В первую очередь исследованию подверглась конструкция
текущей пропорции ответов Pi. Для этого использовались
конструкции, в образовании которых участвовали в различных весовых соотношениях
последние ответы и пропорция всех уже данных в экспериментальной серии ответов,
в частности:
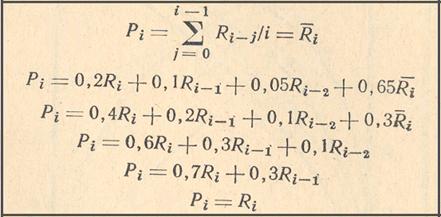
В результате предварительных расчетов оказалось, что ни одна из конструкций не имеет преимуществ ни с точки зрения результатов обнаружения, ни с точки зрения выполнения (3). Поэтому в дальнейшем скачок критерия (1) задавался просто в виде
Δki = c(Ri
― p).
Из последнего соотношения ясно, что саморегулирующие свойства исследуемого механизма принятия решения определяются величиной коэффициента связи с (выражаемого в единицах σ). Величина с определяет величину скачка критерия и таким путем оказывает воздействие на длительность процесса приближения критерия к оптимальному значению, что видно из рис. 3, где представлены результаты расчета положения критерия при различных с: с увеличением с сокращается длительность переходного процесса.
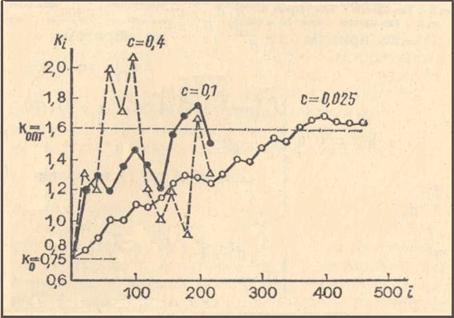
Рис.
3. Кривые изменения критерия k1 в функции от порядкового
номера испытания;
d = 1,5; k0 = 0,75; p= 0,1;
значения с указаны на рисунке в
качестве параметра. Экспериментальные точки — значения
критерия, усредненные за 5 испытаний в окрестности данного i.
Из этого же рисунка видно, что после достижения kопт диапазон колебаний критерия около kопт тем меньше, чем меньше с. Чтобы проверить, как это сказывается на экспериментальных
результатах, были проведены вычисления P(S/s) при k0 = kопт
и при различных с. Оказалось, что
колебательный характер критерия практически не ухудшает результатов, если с≤0,1, однако при больших с ухудшение
102
обнаружения заметно и тем более, чем больше d.
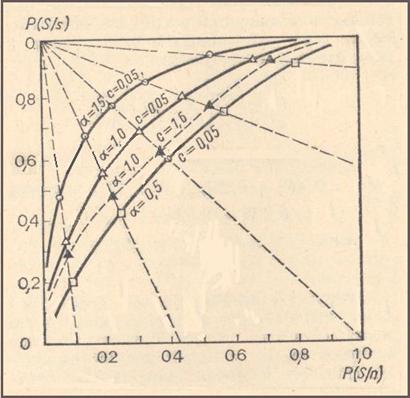
Рис. 4. Расчет РХП при
k0 = kопт по 3000 испытаний на точку.
При малых с колебания
критерия не сказываются на форме РХП (рис. 4), однако при больших с РХП
несколько искажается, оставаясь при этом симметричной относительно отрицательной
диагонали (см. рис. 4, штриховая линия). Отметим также, что при всех случаях
рассчитанные точки в установившемся режиме лежат на лучах, проведенных согласно
(4), что подтверждает выполнение (3).
3. ИССЛЕДОВАНИЕ ОБНАРУЖЕНИЯ НА ФОНЕ НЕПРЕРЫВНОГО ШУМА
(ПОРОГОВАЯ МОДЕЛЬ СЕНСОРНОГО ПРОСТРАНСТВА)
При наличии сенсорного порога сенсорный эффект может
в отдельных пробах оказаться ниже хпор, и
тогда полагается действующим правило (5). В результате при имитации обнаружения
на фоне непрерывного шума решение принимается следующим образом:
Колебания критерия ограничиваются снизу сенсорным
порогом. Согласно [8], хпор = mn + σ.Следовательно, в
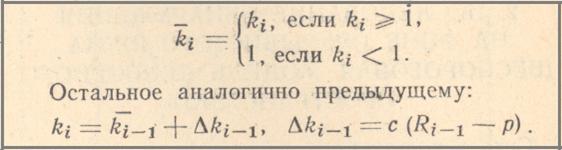
масштабе дополнительной оси (см. рис. 1) колебания критерия k ограничены единицей. Поэтому в описании правила принятия
решения фигурирует k, определяемое
следующим образом:
Исследование различных конструкций текущей пропорции
ответов в (5) показало, что выполнение (3) наилучшим образом обеспечивается,
если Pi = Ři,
т. е. при использовании пропорции всех ответов. Поэтому правило (5) в
дальнейших исследованиях принималось в виде
Введение сенсорного порога и нового правила (5'), действующего при х<хпор привнесло сильный элемент асимметрии в модель принятия решения и существенно изменило ее характеристики (рис. 5).
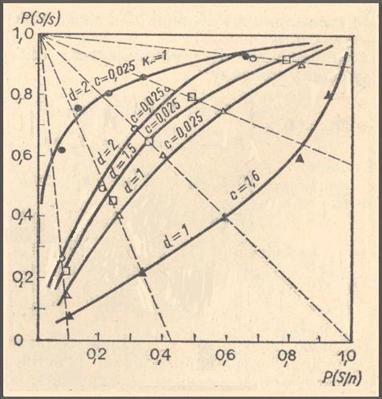
Рис. 5. Расчет РХП для
пороговой модели сенсорного пространства.
Черные кружки — по
1000 испытаний при k0=1, остальные точки — по 3000 испытаний при k0=kопт для
каждого p. p изменялось от
0,1 до 0,9 через 0,2.
Весьма замедлился процесс приближения критерия к
оптимальному значению. Это видно из сравнения двух кривых при d = 2; верхняя кривая (черные кружки) получена при начальном
значении критерия, равном порогу: kо=1,
и усреднение за первые 1000 испытаний еще не дало выполнения (3) при малых р (расчетные точки
выше соответствующих штриховых линий); нижняя кривая (белые кружки) получена
при kо=kопт при каждом р. Из сравнения этих кривых видно, что в переходном режиме
(соответствующем недостаточно длительному тренировочному периоду для каждого р) экспериментальные точки могут
значительно отклоняться от предсказаний теории
103
для установившегося режима (при kо=kопт).
Усилилось влияние коэффициента связи с на форму и расположение РХП (белые и черные треугольники, рассчитанные при разных с); сравни с рис. 4.
Уменьшилось влияние параметра d, особенно при малых р. Это видно из расположения кривых, полученных при разных d и kо=kопт (белые фигуры на рис. 5); сравни с рис. 4.
В целом различные сочетания параметров модели приводят к весьма разным РХП, как несимметричным, так и близким к симметричной форме. Поэтому не представляет особого труда подобрать такие параметры модели, чтобы рассчитанные РХП аппроксимировали данные, полученные в психоакустических экспериментах по обнаружению сигнала на фоне непрерывного шума, как это показано, например, на рис. 6 и рис. 7.
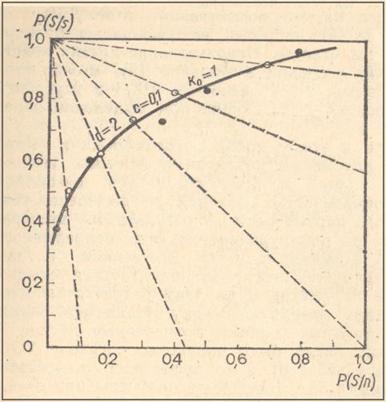
Рис. 6.
Экспериментальные данные для обнаружения на фоне непрерывного шума (черные
кружки) и расчетные (белые кружки) данные для пороговой модели сенсорного
пространства; последние получены по 1000 испытаний. Экспериментальные данные
заимствованы из [10].
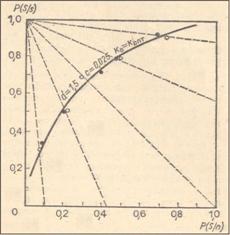
Рис. 7.
Экспериментальные данные для обнаружения на фоне непрерывного шума (черные
кружки) и расчетные данные для пороговой модели (белые кружки); последние
получены при k0=kопт для
каждого p по
1000 испытаний. Экспериментальные данные заимствованы из [10].
4. ОБСУЖДЕНИЕ
Исследование принятия решения при обнаружении сигнала на фоне шума традиционно проводится в рамках теории статистических решений, входящей в ТОС. Предполагается, что испытуемому известны распределения f(x/s) и f(x/n), а также априорная вероятность p(s) предъявления s в экспериментальной серии. Тогда оптимальный в байесовском смысле критерий ответов х0 находится из условия
(6) l(xo)=f(xo/s)/f(xo/n) = p(n)/p(s).
где l означает отношение правдоподобия.
Если в данном испытании сенсорный эффект х превзошел х0 (в теории статистических решений это формулируется в терминах отношения правдоподобия: l(х)>l(х0)), то принимается решение S, если х≤хо, то решение N.
В частности, если p(s)=p(n) = 0,5, то l(xo)=l, что, согласно (6), означает симметричное расположение критерия: хо= mn+ (ms—mn)/2. При р(s)>0,5 критерий xo смещается влево от симметричного положения, при p(s)<0,5 — вправо. Это сопровождается изменением вероятностей правильного обнаружения p(S/s) и ложной тревоги p(S/n), определяемых соотношениями
(7) р(S/s) = F [(ms―хо)σ] и р (S/n) = F[mn―xо)/ σ].
Зависимость p(S/s) от p(S/n), называемая РХП, для нормальных распределений с одинаковыми σ характеризуется единственным параметром d, однако, в отличие от нашей теории, предсказываемое ТОС положение экспериментальной точки на РХП связывается с критерием хo таким образом: тангенс угла наклона касательной к РХП в экспериментальной точке (tg α) дает значение отношения правдоподобия l(хo) в точке xо, или, учитывая (6):
(8) tg α =p(n)/p(s)
(сравни с (4)).
Главной особенностью ТОС является фиксированное положение критерия хo при неизменной инструкции, откуда следует возможность раздельного выделения из результатов эксперимента сенсорного параметра (d) и параметра принятия решения (xо). Более того, согласно ТОС, получаемые в эксперименте результаты, выражаемые в p(S/s) и P(S/n), дают возможность, используя (7), однозначно определить величину d независимо от положения xо другими словами, параметр d однозначно выделяется при любой инструкции, в том числе не связанной с заданием априорной вероятности в численной форме.
104
Некоторые экспериментальные данные, как, например, приведенные на рис. 7 (черные кружки), действительно хорошо аппроксимируются симметричной РХП, которую можно характеризовать единственным параметром d, что оправдывает энтузиазм сторонников ТОС.
Вместе с тем ТОС имеет серьезные недостатки. Во-первых, многие экспериментальные результаты характеризуются несимметричной РХП (см. рис. 6), и для согласования ТОС с экспериментальными данными пришлось постулировать существенное различие распределений f(x/s) и f(x/n) по величине стандартного отклонения;, это предположение при практически используемых уровнях сигнала и шума весьма искусственно и к тому же не согласуется с выводами теории идеальных наблюдателей, входящей в ТОС [10]. Во-вторых, даже при симметричной РХП оценка величин реально используемых критериев хo весьма значительно расходится с предсказаниями теории (см. [3]); например, для p(s) = 0,l (рис. 7, нижний черный кружок) оценка реального отношения правдоподобия l(хo) как тангенса угла наклона касательной к РХП в экспериментальной точке дала l(xo ) =tgα = 2,2, в то время как теория предсказывает l(xo) = tg α= p(n)/p(s)=9. Другие недостатки ТОС разбирались в [7].
Наша теория принятия решения не имеет указанных недостатков: она предсказывает как симметричные, так и несимметричные РХП (при непрерывном шуме), причем расположение экспериментальных точек на РХП согласуется с предсказаниями теории. Характерной особенностью теории являются постоянные колебания (скачки) критерия около некоторого оптимального значения. Более простая в формальном описании, она при этом охватывает большее, чем ТОС, число несенсорных (и сенсорных, при ограниченном сенсорном пространстве) параметров. Однако трактовка получаемых результатов оказывается более сложной и неоднозначной.
Наша теория обещает уверенное выделение параметра d лишь в условиях прерывистого предъявления шума, когда длительность переходного процесса незначительна и практически не влияет на результаты достаточно длительного эксперимента, а заметное ухудшение результатов за счет особенностей принятия решения (скачков критерия) проявляется лишь при слабой тренированности испытуемого (большие значения с).
Если же обнаружение сигнала производится традиционно, на фоне непрерывного шума, то РХП оказывается, в общем случае, несимметричной, сильно зависящей от тренированности испытуемого (величина с), от длительности эксперимента (ввиду длительного переходного процесса) и слабо зависящей от d (особенно при малых р, см. рис. 5).
Расчеты проводились при оптимальной конструкции текущей пропорции ответов; для реализации принципа саморегулирования, заложенного в (1), достаточно было использовать лишь один последний ответ (это согласуется с экспериментально выделенным влиянием лишь одного предшествующего ответа испытуемого на его последующий ответ [5]); в правиле (5), напротив, использовалась пропорция всех ответов. Использование других конструкций, особенно в правиле (5), может также привести к изменению РХП и усугубить трудности, возникающие при выделении параметра d.
Если к этому добавить возможность межиндивидуальных различий в величине сенсорного порога xпор, то становится очевидной проблематичность достоверного выделения сенсорного параметра d из результатов эксперимента по обнаружению на фоне непрерывного шума методом «да-нет». Во всяком случае, традиционное использование (7) для определения параметра d по этим результатам дает заведомо неверную оценку. Например, экспериментальные данные, приведенные на рис. 7, должны были быть получены, согласно ТОС, при d = 0,85 [10], в то время как в действительности они могут быть получены при d=l,5 (белые кружки на рис. 7).
Таким образом, следует избегать использования метода
«да-нет» при непрерывном предъявлении шума ввиду
сильного влияния на результаты эксперимента несенсорных параметров (с, Pi, ko), а также зависимости
результатов от возможных межиндивидуальных различий в
величине сенсорного порога xпор.
ВЫВОДЫ
Использование ЭВМ для исследования
модели принятия решения испытуемым при слуховом обнаружении сигнала на фоне
шума показало, что реализация принципа саморегулирования, основанного на
сравнении текущей пропорции ответов с вероятностью появления сигнала, приводит
(в установившемся режиме) к колебаниям критерия принятия решения около
оптимального значения, определяемого вероятностью появления сигнала, даже в том
случае, когда текущая пропорция ответов формируется из одного последнего
ответа;
при непороговой модели сенсорного пространства, соответствующей обнаружению на фоне прерывистого шума, результаты вычислительных экспериментов, несмотря на колебания критерия, слабо зависят от несенсорных параметров, в частности от коэффициента связи, величина которого определяется тренированностью испытуемого, РХП симметрична, и ее положение (при не слишком больших коэффициентах связи) однозначно определяется величиной сенсорного параметра d;
при пороговой модели сенсорного пространства, соответствующей обнаружению на фоне непрерывного шума, результаты вычислительных экспериментов в сильной степени зависят от несенсорных параметров, именно от коэффициента связи, конструкции текущей пропорции ответов и от величины критерия в начале эксперимента, РХП в общем случае несимметрична и не связана однозначно с сенсорным параметром d, откуда следует рекомендация избегать использования метода «да-нет» при непрерывном предъявлении шума;
результаты вычислительных экспериментов, проведенных с моделью принятия решения, хорошо согласуются с результатами психоакустических экспериментов.
105
1.
Бардин К. В. Проблема порогов чувствительности и психофизические методы. —
М., 1976. — 395 с.
2. Забродин Ю. М., Лебедев А. Н. Психофизика и
психофизиология. — М., 1977, с. 6—167.
3. Индлин Ю. А.
Деятельность наблюдателя в ситуации обнаружения. — Вопросы психологии, 1975, №
3, с. 73—83.
.4. Индлин Ю. А. Модель обучаемого наблюдателя в ситуации
обнаружения и различения. — В сб.: Проблемы принятия решения
/ Под ред. В. Ф. Рубахина. М., 1976, с. 56—77.
5. Индлин Ю. А.
Способы выделения сенсорной функции. — В сб.: Психофизические исследования / Под ред. Б. Ф. Ломова, Ю. М. Забродина.
М., 1977, с. 189—217.
6. Индлин Ю. А.
Качественная оценка работы испытуемого при использовании метода констант. — В
сб.: Психофизика сенсорных систем / Под ред. Б. Ф.
Ломова, Ю. М. Забродина. М., 1979, с. 129—139.
7. Индлин Ю. А.
Принятие решения при обнаружении и различении. — Вопросы психологии, 1980, № 3,
с. 78—87.
8. Индлин Ю. А. Об
абсолютном пороге в психоакустике. — Вопросы
психологии. 1982, № 3, с. 108—112.
9. Леонов
Ю. П. Теория статистических решений и психофизика. — М., 1977, с. 9—221.
10. Green D. M., Swets
J. A. Signal detection theory and psychophysics. N. Y.: Wiley, 1966. 455 p.
Поступила в редакцию 9. VIII. 1982 г.
1 Мы не вводим в расчеты еще один несенсорный фактор,
связанный с утомлением испытуемого [5], [6] — наличие периодов невнимания,
поскольку влияние этого фактора легко учитывается аналитически.