120
ФОРМИРОВАНИЕ ПРЕДСТАВЛЕНИЙ О МЕХАНИЧЕСКИХ СВЯЗЯХ И ЗАВИСИМОСТЯХ У ДОШКОЛЬНИКОВ
Р. П. ЧЕПЕНЕ
В исследованиях, проводимых в лабораторий психологии детей дошкольного возраста НИИ дошкольного воспитания АПН СССР под руководством Л. А. Венгера, было выявлено, что психологическим содержанием формирования общих умственных способностей дошкольников является овладение действиями пространственного
121
моделирования [1], [2]. Показано, что моделирование может быть успешно использовано как средство, обеспечивающее усвоение дошкольниками различного рода знаний и умений [7]. В частности, из исследований В. В. Юртайкина [9] видно, что ребенок значительно легче усваивает простейшие механические связи и зависимости в случае, если они представлены в форме наглядно заданной модели, с которой ребенок может особым образом действовать. Однако данное положение было раскрыто автором лишь в самом общем виде. Вопросы о последовательности формирования, конкретных видах моделей и условиях их применения, переносе усвоенного принципа на более сложные устройства автором были только поставлены, но не исследованы. Между тем знакомство с данным типом отношений существенно для развития ребенка с точки зрения как теории, так и практики дошкольного воспитания [6].
Перед нами встала задача разработать конкретные виды моделирования, которые могут быть использованы для обучения детей пониманию некоторых механических связей и зависимостей.
Исследование проводилось на материале изучения процесса решения так называемых рычаговых задач. Специфичность условий этих задач заключается в том, что взаимосвязи составных частей рычага (плеч и оси вращения) проявляются только в динамике, при его использовании для достижения какой-либо пространственной цели.

Учитывая это обстоятельство, в процессе формирования представлений о связях, лежащих в основе устройств рычагового типа, мы применили специфическую пространственную модель, изображавшую основные элементы рычага и ситуацию, в которую данный рычаг включен. Содержание моделируемых зависимостей раскрывалось для ребенка при помощи стрелок, замещавших динамические связи элементов устройства. Таким образом, модель, будучи по внешнему виду пространственной статической схемой, отражала внутренние динамические взаимосвязи элементов рычага, существенные для решения задачи. Такого рода схему мы назвали «динамическая модель».
Для того чтобы проверить эффективность обучения, мы сочли нужным сравнить его с другим способом формирования этих представлений, имеющим иной психологический смысл. С этой целью формирующий эксперимент проводился параллельно в двух группах — экспериментальной и контрольной (первую составили 14 детей старшего дошкольного возраста, посещавших один из детских садов Москвы, вторую — 12). Дети, входившие в эти группы, обучались на идентичном содержании, только разными способами.
Методика формирования в экспериментальной группе строилась таким образом, чтобы обеспечить усвоение детьми закономерностей действия рычага (имеются в виду особенности пространственного перемещения его частей) путем использования, построения и преобразования указанных выше графических моделей, которые выступали в качестве средств решения задаваемых ребенку реальных задач. Эти модели отражали в обобщенной форме закономерности функционирования, заложенные в рычаговом устройстве, и позволяли осуществить «симультанный синтез» взаимосвязей отдельных его элементов, что, на наш взгляд, должно было способствовать формированию целостного представления о структуре рычагового механизма.
В контрольной группе ребенку по ходу решения каждой задачи также предлагалось схематическое изображение задаваемого рычагового устройства, но уже без обозначения его внутренних связей. Такое обозначение осуществлял сам ребенок собственным движением, на статической схеме рычага указывая динамику отношений составляющих его элементов. При подобном «двигательном моделировании» функциональных зависимостей устройства, по нашим предположениям, ребенок, в отличие от первого способа обучения, должен был сам дойти до построения внутреннего целостного образа динамических зависимостей механической системы.
Таким образом, обе группы знакомились с одним и тем же материалом, а также обучались решению рычаговых задач при помощи моделирования. Разница заключалась лишь в самой специфике последнего.
До начала обучения в экспериментальной группе дети знакомились с функцией стрелки. Важно было показать ребенку, что стрелка может выступать не только как указатель направления движения одного объекта к другому, но и как специфический элемент, объединяющий эти объекты во взаимосвязанную систему, т. е. структурирующий отношения между ними.
После того как дети усваивали функцию стрелки, мы переходили к собственно обучающему эксперименту. На его начальных этапах дети экспериментальной группы пользовались готовой моделью (рис. 1) для решения простейших рычаговых задач, условия которых предусматривали учет противонаправленности движения плеч рычага (с помощью последнего ребенок перемещал прикрепленную на нем картинку из одной точки пространства в другую.)
122
Выяснилось, что, пользуясь подобными изображениями, дети без труда решили все предложенные им реальные задачи, причем модели принимались «с ходу», без специальных объяснений. Проведенный нами ранее констатирующий эксперимент показал, что без использования модели правильно решить аналогичную задачу оказалась способной лишь меньшая часть испытуемых данного возраста.
Большинство детей контрольной группы также удачно справились с данной задачей. «Двигательное моделирование» явилось достаточным средством для формирования ориентировки в простейшем механическом устройстве, где нужно было учитывать лишь один параметр: противонаправленность движения элементов отдельного рычага.
Далее дети экспериментальной группы уже самостоятельно строили «динамическую модель», т. е. на схематическом рисунке ситуации, в которую был включен рычаг, расставляли стрелки, обозначая при этом характер взаимосвязи частей рычага и тем самым указывая направление действий, которые нужно было осуществить для достижения поставленной цели. При помощи практического действия ребенок мог убедиться в адекватности построенной модели.
Контрольная группа решала аналогичную по содержанию задачу, осуществляя при этом двигательную ориентировку: на схематическом рисунке ребенок движением руки указывал направление движения плеч рычага, необходимое для достижения цели, и затем осуществлял соответствующую практическую пробу на реальном рычаге.
Дальнейшие этапы формирования заключались в усложнении внешнего вида рычага. Модели здесь выступали в качестве средства, демонстрирующего ребенку, что изменение внешнего вида (формы) не влияет на существенные взаимосвязи составных частей рычагового устройства.
Как показали результаты промежуточных контрольных заданий, в которых использование и построение модели являлись единственным путем решения, ориентировка на элементарные механические зависимости успешно складывалась в обеих группах, т. е. при помощи «динамической модели» и путем «двигательного моделирования».
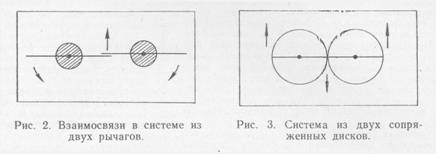
Исходя из полученных результатов, мы предположили, что эффективность способов обучения должна проверяться на более сложных задачах. Такая проверка была осуществлена на последующих этапах формирования. С этой целью рычаг-планка был введен в систему взаимодействия с другим рычагом, за счет чего направление движения плеч одной планки стало определяться движением плеч другой планки (рис. 2).
Сравнив результаты решения задачи на построение модели данной системы, мы получили статистически значимое различие (р<0,01) в пользу экспериментальной группы: это говорит о том, что пространственная графическая модель является более эффективным средством ориентировки в сложном механическом устройстве, чем «двигательное моделирование».
Дальнейший этап обучения включал еще более сложные задания, где принцип рычага уже не выступал в явной форме, а содержался в скрытом виде. В этом случае схема служила средством, способствующим переносу ранее усвоенного принципа противонаправленности движения плеч рычага на другие типы механических устройств, так как она наглядно демонстрировала, что, например, система из двух соприкасающихся дисков представляет собой уже знакомую систему из двух рычагов (рис. 3).
Затем мы вводили в ориентировочную основу ориентировку не только на общее направление перемещения плеч рычага, но и на величину угла их поворота. Проверка способностей детей учитывать оба вышеозначенных параметра осуществлялась в специальном эксперименте. Имелись два прозрачных сопряженных между собой диска, вращавшихся вокруг своих осей. Поворот одного из них приводил в движение и другой, только в противоположном направлении. Под дисками располагались круги, разделенные на равные разноцветные секторы. На дисках размещались точки, которые при повороте системы пересекали одинаковое количество секторов, а направление их перемещения определялось направлением поворота дисков. Для решения задачи ребенку необходимо было учитывать величину угла поворота точек (количество пересеченных секторов) и направление их движения. Контрольная задача подобного типа решалась без опоры на какую-либо схему. В результате была получена статистически
123
значимая разница (р<0,05) по среднему количеству правильных ответов между экспериментальной и контрольной группами в пользу экспериментальной, что подтверждает предположение о более высоком уровне внутренних представлений детей, усваивавших механические зависимости путем их наглядного моделирования.
Об этом же свидетельствуют данные, полученные в обеих группах испытуемых при помощи модифицированных методик Г. И. Минской [5], А. Р. Лурия [4] и Э. С. Комаровой [3; 6], в которых решение задач требовало адекватной ориентировки в существенных отношениях между элементами рычаговых устройств различного типа.
Формирование представлений о пространственных динамических отношениях в механической системе составило лишь часть нашего исследования.
Особое место в нем занимало обучение детей пониманию условий равновесия рычага на примере рычажных весов, которое требовало помимо учета пространственного фактора ориентировки и на количественные параметры (величину действующих сил и длину плеч). Согласно Ж. Пиаже [10], для совершения адекватных действий с рычажными весами необходимо владеть логическими операциями коррелятивности, реципрокности и инверсии. Это означает, что если мы хотим использовать модель для представления ребенку тех отношений, которые существуют в рычажных весах, она должна отражать логические связи между количественными параметрами, но при этом сохранять свою наглядную форму.
Учитывая вышеизложенное, при обучении детей экспериментальной группы мы применили модель, которую можно назвать пространственно-логической. В роли заместителей единиц веса и расстояния (имеется в виду расстояние от места крепления грузов до оси вращения) в этой модели выступили уже знакомые детям стрелки. Действия моделирования осуществлялись на схематическом рисунке весов, воспроизводящем отношения параметров, но не демонстрирующем результата их воздействия на равновесие весов. Ребенку предлагалось последовательно разложить на данном рисунке в вертикальные столбики, вплотную друг за другом, «стрелки веса» и «стрелки расстояния», так, чтобы их количество в столбиках соответствовало числу реальных единиц веса и расстояния для каждого плеча коромысла весов. Так как величина стрелок была одинаковой и для веса, и для расстояния, а отличались они друг от друга только цветом, то создавалась возможность по высоте столбиков наглядно представить и сравнить между собой величины прилагаемых к плечам сил и тем самым вынести суждение о наличии или отсутствии равновесия. Уравнивание столбиков при помощи добавления или убавления условных единиц веса и расстояния позволяло ребенку «проиграть» все возможные варианты достижения равновесия. Ребенок видел, что один Параметр (например, вес) может быть компенсирован как таким же параметром, так и другим (расстоянием), а равновесие обеспечивается лишь в случае равенства суммы стрелок в обоих столбиках, независимо от соотношения единиц веса и расстояния внутри каждого из них.
Дети контрольной группы знакомились со способами решения задач с весами путем практических манипуляций, переходя последовательно от самых простых способов, где равновесие достигалось за счет компенсации изменения одного из параметров, но варианта, где нужно было учитывать отношения между обоими параметрами.
Проведенный вслед за обучением контрольный эксперимент показал качественную разницу в способах решения задачи в обеих группах. Если все дети экспериментальной группы решали задачу с весами, основываясь на понимании обратимости соответствия грузов и расстояний, то дети контрольной группы устанавливали равновесие лишь за счет действий с одним параметром.
Результаты отсроченного контроля, проведенного спустя две недели, убедительно показали значимо большую прочность сформированных представлений об условии равновесия в весах у детей экспериментальной группы. После основного задания детям предлагалось также решить серию задач Ж. Пиаже «на сохранение». В экспериментальной группе отсутствие феномена Пиаже зафиксировано в 79 % случаев, а в контрольной группе лишь в 36 %, что свидетельствует о большем развивающем эффекте при первом способе обучения.
Таким образом, в результате проведенного исследования выявилось преимущество пространственного моделирования как средства ориентировки в механических устройствах по сравнению с «двигательным моделированием». Построение и использование пространственной «динамической» и пространственно-логической моделей позволило сформировать у детей экспериментальной группы более высокий уровень представлений о механических связях и зависимостях и способствовало их сдвигу по некоторым показателям в общем умственном развитии. Можно предположить, что указанные сдвиги явились результатом сложившейся у детей по ходу формирования способности к симультанному «схватыванию» ситуации, представлению условий задачи в едином образе, материализованным выражением которого как раз и явились те модели, с которыми ребенку приходилось иметь дело в процессе нашего обучения.
1. Венгер Л. А. О формировании познавательных способностей в процессе обучения дошкольников. — Дошкольное воспитание, 1979, № 5, с. 36—39.
124
2. Диагностика умственного развития дошкольников / Под ред. Л. А. Венгера, В. В. Холмовской. — М., 1978. — 248 с.
3. Комарова Э. С. Формирование у дошкольников умений действовать в плане представлений: Канд. дис. — М., 1978, с. 128—132.
4. Лурия А. Р. Высшие корковые функции человека и их нарушения при локальных поражениях мозга. — 2-е изд., доп. — М., 1965, с. 372.
5. Минская Г. И. Переход от наглядно-действенного к рассуждающему мышлению у детей дошкольного возраста: Канд. дис. — М., 1954, с. 120—181.
6. Поддьяков Н. И. Мышление дошкольника. — М., 1977. — 271 с.
7. Проблемы формирования познавательных способностей в дошкольном возрасте / Под ред. Л. А. Венгера. — М., 1980. — 85 с.
8. Чепене Р. П., Юртайкин В. В. Экспериментальное исследование понимания детьми некоторых механических зависимостей. — В кн.: Актуальные проблемы воспитания и формирования личности дошкольника / Под ред. Ю. Ф. Змановского, А. Ф. Говорковой. — М., 1980, с. 86—105. (Рукопись деп. в ОЦНИ «Школа и педагогика» М-ва просвещения СССР и АПН СССР).
9. Юртайкин В. В. Формирование модельных представлений как эффективное средство развития умственной деятельности. — В кн.: Психолого-педагогические основы совершенствования обучения и воспитания в детском саду / Под ред. Ю. Ф. Змановского. — М., 1979, с. 57—71.
10. Inhelder В., Piaget J. Equilibrium in the Balance. — In: The growth of logical thinking from childhood to adolescence. N. Y.: Basic Books, 1958, p. 164—181.