132
О ВЛИЯНИИ «ЗОНЫ НЕЧУВСТВИТЕЛЬНОСТИ»
В ХАРАКТЕРИСТИКЕ ОБЪЕКТА УПРАВЛЕНИЯ
НА КАЧЕСТВО ВЫПОЛНЕНИЯ СЛЕЖЕНИЯ
В. Г. ЗАЗЫКИН, А. П. ЧЕРНЫШЕВ
Институт психологии АН СССР, Москва
Объекты управления в полуавтоматических системах представляют собой совокупность динамических элементов, которые осуществляют некоторое функциональное преобразование между входным и выходным сигналом. Вид динамических элементов определяет вид системы, в состав которой они входят. Влияние на эффективность слежения параметров объекта управления, описываемого линейными дифференциальными уравнениями первого и второго порядка с постоянными коэффициентами, рассмотрено ранее [4].
Большой класс, имеющий широкое распространение на практике, составляют нелинейные системы управления. Нелинейной называется система, у которой хотя бы для одного элемента не выполняется принцип суперпозиции. Так, например, если объект управления содержит механические передачи или гидравлические приводы, то имеет место момент сопротивления управляющему усилию, вызванный моментами сухого и вязкого трения. Моделью такого явления служит так называемая зона нечувствительности.
Процессы, протекающие в нелинейных системах, и их собственные движения гораздо сложнее процессов и движений в линейных системах. Особые трудности представляет исследование функционирования полуавтоматических нелинейных систем управления, так как до настоящего времени не изучены вопросы, связанные с особенностями деятельности в них человека-оператора.
МЕТОДИКА
Для исследования влияния нелинейности характеристик объекта управления на качество выполнения слежения был поставлен лабораторный эксперимент. В качестве модели операторской деятельности использовалось одномерное компенсаторное слежение (рис. 1). Входными сигналами, поступающими на систему, являлись гармонические колебания

Рис. 1. Принципиальная схема проведения эксперимента
с постоянной амплитудой и возрастающей с шагом 0,05 Гц частотой, изменяющейся от, 0,1 Гц до срыва слежения. Расстояние от глаз испытуемого до экрана индикатора составляло 0,8 м. Размах колебания луча индикатора — 0,08 м. Слежение осуществлялось по вертикальной оси.
В эксперименте принимали участие обученные операторы (21 человек), прошедшие соответствующий профессиональный отбор.
Исполнительное устройство представляло собой незагруженную потенциометриче-скую ручку управления с линейной рабочей характеристикой. Эксперимент проводился 1 при дневном освещении. Объект управления, содержащий нелинейность типа зоны нечувствительности, моделировался на аналоговой вычислительной машине и включался в контур управления. Величина зоны нечувствительности ос изменялась в пределах от ±5 до ±15 В с шагом ±5 В. Диапазон амплитуды управляющих движений оператора составлял ±30 В. Входной сигнал, ответная реакция оператора и ошибка слежения записывались на магнитографе и самопишущем приборе.
Для случая компенсаторного слежения ошибка совпадает с сигналом, поступающим на зрительный анализатор человека-оператора. Иначе говоря, ошибка рассматривается не только как шум, вносимый человеком в систему, но и как информация для человека о результатах его действий и состоянии процесса управления. Подобный подход предполагает анализ причин возникновения ошибки, которые обусловлены особенностями деятельности человека. На наш взгляд, в управляющих действиях человека-оператора, выполняющего
133
сенсомоторную деятельность, содержится большое количество информации именно о психологических аспектах его деятельности.
В качестве показателей эффективности компенсаторного слежения были использованы следующие характеристики ошибки:
дисперсия ошибки как функция частоты предъявляемого сигнала (характеризует мощность случайной составляющей ошибки слежения);
изменение степени «стохастичности» ошибки слежения в зависимости от частоты входного сигнала (характеризует ширину спектра шума ошибки);
гармонический (и спектральный) состав ошибки;
функция когерентности процессов «ошибка слежения — управляющие действия . ператора» как показатель нелинейности сенсомоторного преобразования человека-оператора..
Аналогичные показатели качества выполнения слежения были ранее использованы в работах [1], |[4] и базируются на том экспериментально установленном факте, что :ошибка компенсаторного слежения представляет собой стационарный случайный процесс с детерминированными гармоническими составляющими.
РЕЗУЛЬТАТЫ И ОБСУЖДЕНИЕ
Наличие зоны нечувствительности в характеристике объекта управления или исполнительного устройства приводит к тому, что в интервале ее действия а никакое управляющее движение оператора не приводит к соответствующему перемещению луча на экране индикатора. Эксперимент проводился таким образом, что операторам не сообщалось об изменении динамической характеристики объекта управления. Процесс адаптации операторов к изменившимся условиям эксперимента носил характер, общий для всех
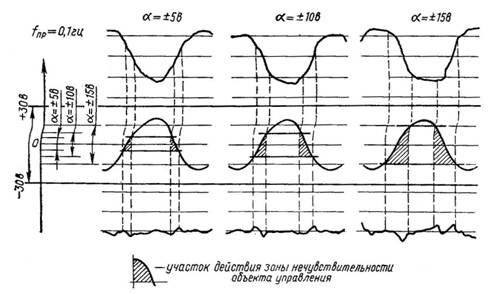
Рис. 2. Запись результатов экспериментов
испытуемых. Отсутствие эффекта об управляющих действиях оператора в интервале зоны нечувствительности приводило к резкому увеличению двигательной активности испытуемых. Содержание двигательной активности в процессе адаптации носило случайный характер. На первых порах преобладали гностические движения относительно высокой амплитуды и частоты.
К моменту окончания действия зоны нечувствительности оператор приходил с ошибкой, намного превышающей допустимую данным режимом слежения без зоны нечувствительности в объекте управления. После прохождения зоны нечувствительности у оператора наблюдался переходный процесс, связанный с вхождением в режим «линейного» слежения.
В процессе тренировки операторы выработали определенный навык, связанный с увеличением скорости управляющих движений при прохождении зоны нечувствительности. Причем чем больше была величина зоны нечувствительности, тем отчетливее проявляется этот эффект. Подобный режим слежения создавал «местные» опережения по фазе ответных управляющих действий по отношению ко входному сигналу. Чтобы следить в фазе с предъявленным сигналом, оператор задерживал свои управляющие движения в его экстремальных зонах. Поэтому его механограмма по форме близка к прямоугольным колебаниям. Наиболее отчетливо это проявляется с увеличением зоны нечувствительности при отслеживании низкочастотного входного сигнала (рис. 2).
С возрастанием частоты предъявляемого гармонического сигнала оператор увеличивает скорость своих управляющих действий. В результате происходит изменение
134
формы механограммы ответной реакции, приближающейся в среднем к входному сигналу.
Таким образом, наибольшая (относительно входного сигнала) ошибка фиксируется в эксперименте при отслеживании сигналов низкой частоты. Причем чем больше величина зоны нечувствительности, тем с большей ошибкой осуществляется слежение. Характер изменения ошибки слежения в интервалах действия зоны нечувствительности идентичен для всех ее значений а в исследованном диапазоне частот предъявляемого сигнала.
Влияние зоны нечувствительности объекта управления на процесс слежения сходно с известной исследовательской экспериментальной ситуацией слежения «по представлению» [2], [3]. И в данном случае можно предположить, что в интервале действия зоны нечувствительности происходит распад перцептивных образов процесса слежения, необходимым условием существования которых является наличие жесткой связи между управляющим действием оператора и изменением входного (для оператора) сигнала. Само построение управляющих действий оператора, основанное на «форсировании» (увеличении скорости управляющих действий) зоны нечувствительности объекта управления, является подтверждением стремления операторов сохранить целостность представления о характере протекания процесса слежения, которая нарушалась при отсутствии в зоне нечувствительности связи между управляющими действиями оператора и «поведением» объекта управления.
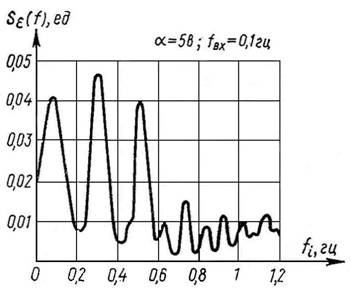
Рис. 3. Спектральный состав ошибки слежения
Из теории автоматического регулирования известно, что сигнал, проходящий через нелинейность, «обогащается» на выходе дополнительными гармоническими компонентами, определяемыми параметрами этой нелинейности. Иными словами, на сенсорный вход оператору подается помимо управляющей еще и информация, зависящая от нелинейности объекта управления. Экспериментально установлено, что при, осуществлении слежения оператор использует главным образом ту информацию, которую создает сам благодаря своим исполнительским или управляющим действиям и проявлению специфической активности, нашедшей свое отражение в дополнительных движениях. Изменение этой информации за счет «обогащения», новыми гармоническими компонентами, порождаемыми нелинейностью объекта управления, ухудшает адекватность отражения процесса управления и, как следствие, затрудняет построение управляющих действий, необходимых для осуществления слежения.
Подобные объективные сложности в отражении объекта управления и самого процесса слежения вынуждают оператора увеличивать свою активность при организации управляющих действий, направленную на познание характеристик объекта управления и процесса слежения. Поэтому в ответной реакции операторов присутствовало множество дополнительных движений, носящих гностический и ориентировочный характер.
Особенно много их в переходном процессе вхождения в режим слежения после окончания действия зоны нечувствительности.
Наглядной иллюстрацией сложного характера построения управляющих действий оператора в данном эксперименте явился спектральный состав ошибки слежения (рис. 3). По сравнению с периодом эксперимента, когда объект управления описывается безынерционным усилительным звеном, спектральный состав ошибки слежения существенно расширен. Причем по мощности гармонические составляющие ошибки слежения в случае нелинейности характеристик объекта управления примерно равны доминирующей гармонике, возникающей из-за характерного изменения входного гармонического сигнала в экстремальных точках. Анализ функции когерентности процессов «ошибка слежения — ответная реакция» показал, что оператор осуществляет нелинейное преобразование входного сигнала в ответную реакцию (рис. 4). Сложное построение управляющих действий при наличии нелинейного объекта управления приводит к снижению точности слежения. Это обусловлено тем, что дополнительные движения, носящие познавательный характер, с точки зрения теории управления являются
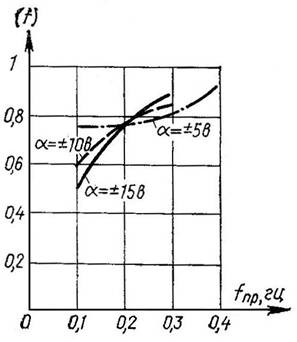
Рис. 4. Изменение функции когерентности процессов «ошибка слежения — управляющие действия оператора».
135
«лишними» для осуществления слежения. И следовательно, увеличение их доли в управляющих действиях являлось причиной возрастания ошибки слежения. К тому же форсирование скорости управляющих действий в интервале зоны нечувствительности способствовало установлению режима слежения, существенно отличного от заданного алгоритма. Увеличение ошибки слежения вследствие влияния зоны нечувствительности нашло свое однозначное отражение в изменении ее статистических показателей — дисперсии и степени «стохастичности» (рис. 5).
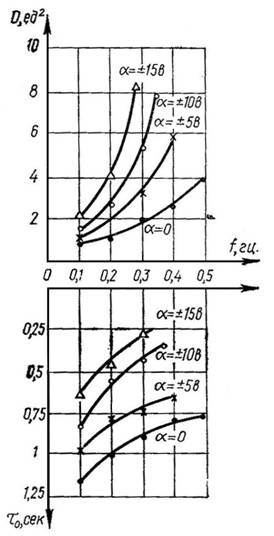
Рис.5. Изменение дисперсии и степени «стохастичности» ошибки слежения
Возрастание ошибки слежения в данном случае свидетельствует о том, что наличие в объекте управления зоны нечувствительности существенно затрудняет выполнение слежения оператором.
Однако, несмотря на возрастание ошибки слежения, увеличение доли дополнительных движений давало свой положительный эффект с точки зрения устойчивости слежения. Операторы, организуя подобным образом управляющие действия, как бы жертвовали точностью ради устойчивости, т. е. ради осуществления самого процесса слежения как такового.
Экспериментальное исследование слежения при плавном увеличении зоны нечувствительности объекта управления от 0 до ± В показало, что имеет место некоторое значение величины зоны нечувствительности, где эффект нелинейности не оказывал влияния на эффективность слежения или влиял очень мало. Это позволяет сделать вывод о наличии определенного «порога» нелинейности объекта управления при слежении. Следовательно, при проектировании объектов управления с неизбежной реальной характеристикой зоны нечувствительности следует стремиться делать ее не более пороговой величины.
1. Бодров В. А., Зазыкин В. Г., Чернышев А. П. Компенсаторное слежение за гармоническим сигналом. — Инженерная психология. — М., 1977, с. 285—301.
2. Водлоэеров В. М. Опыт экспериментального исследования прослеживающих движений. В сб. Проблемы общей и инженерной психологии. — Л., 1964, с. 59—67.
3. Водлоэеров В. М. К проблеме экстраполяции. В сб. Вопросы инженерной психологии в автоматизированных системах управления. — Л., 1972, с. 36—48.
4. Зазыкин В. Г., Чернышев А. П., Николаев С. А. Влияние динамических характеристик объекта управления на эффективность функционирования человека-оператора. Тезисы докладов на V Всесоюзном симпозиуме по эффективности, качеству и надежности систем «человек—техника». Л., 1978, с. 36—37.